PRESENTATION DIDIER
Didier 2.0 le premier robot pour l’animation de rue
Didier est un robot piloté en raspberry et arduino. Il est le fruit de milliers d’heures de développement accessible sur github :

INTERIEUR
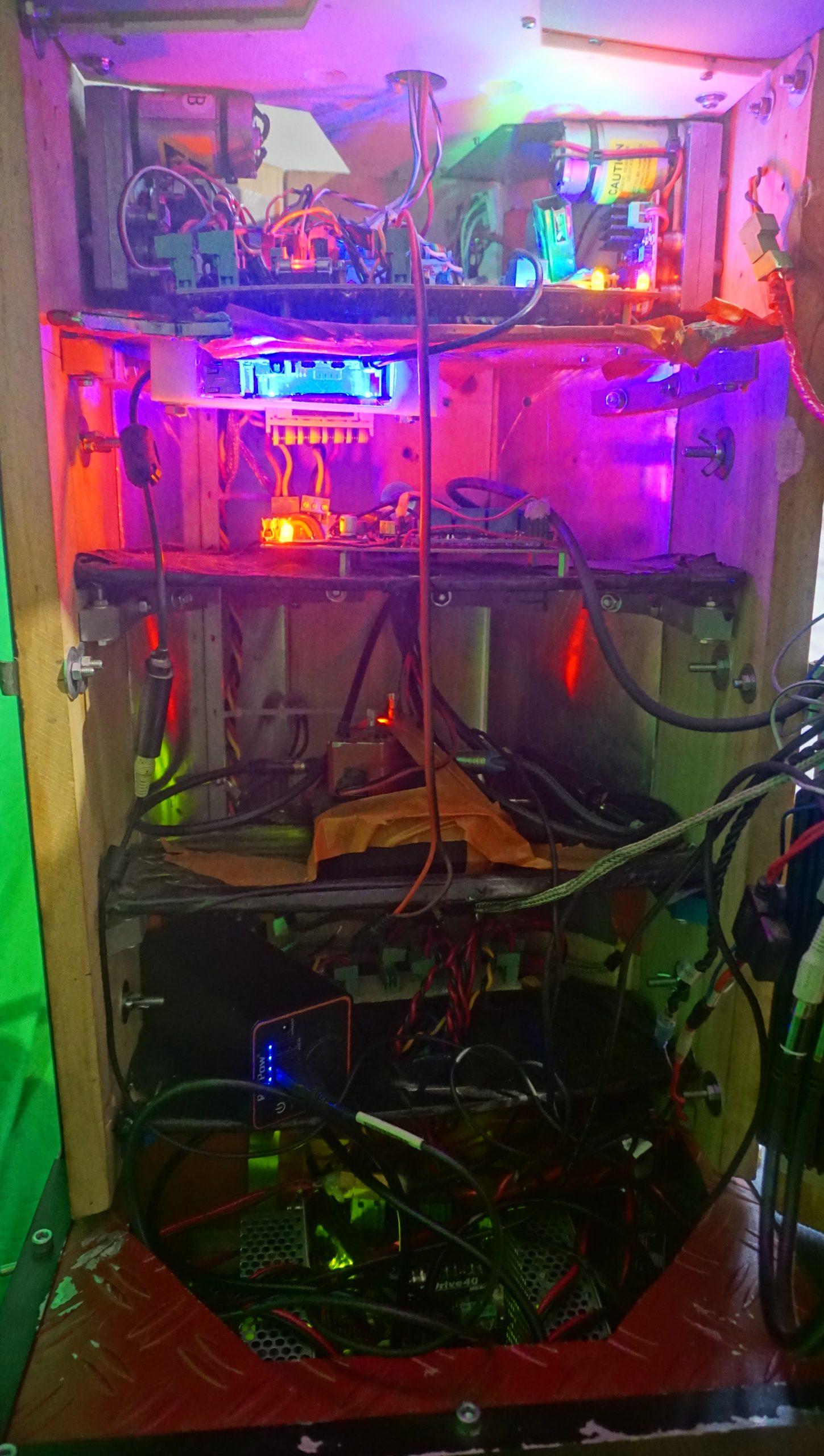
LE CORPS EST CONSTITUEE DE PLUSIEURS ETAGE
A l’intérieur, il y a plusieurs étage, le premier contient la carte mère du robot. Le deuxième, contient l’électronique controlant l’audio. Le troisième contient le recepteur hf et un octaveur. Le dernier contient les différents alimentations. En dessous sont disposés les controleur de moteurs, et la batterie
PARTIE ARRIERE
DIDIER EST CONSTITUEE EN HEXAGONE
Lorem ipsum dolor sit amet, at mei dolore tritani repudiandae. In his nemore temporibus consequuntur, vim ad prima vivendum consetetur. Viderer feugiat at pro, mea aperiam.

COBNTROLE
Le robot est controlé a distance a l’aide d’une raspberry et de gants
Didier est contrôlé par un logiciel développé totalement développé pour cette usage. Le code est accessible et open source : https://github.com/duvamduvam/DadouControlL
La raspberry pi 4 est relié a deux carte raspberry pico branché a des gants possédant des boutons
